 Gradienten-Regler
Gradienten-Regler
Gradienten-Regler
Gradienten-Regler
Gradienten-Regler
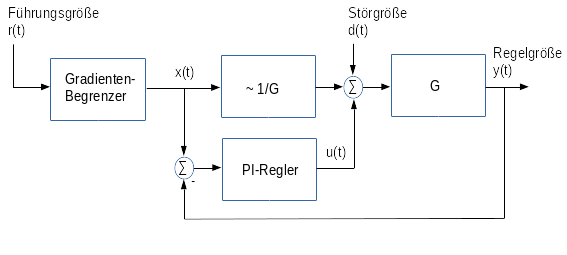
Ein Gradienten-Regler besteht aus einem Gradientenbegrenzer und einem nachgeschalteten Regler. Der Gradientenbegrenzer begrenzt ein oder zwei Ableitungen der Führungsgröße. Das kann verwendet werden, um z.B. bei Sprüngen in der Führungsgröße den Komfort einer Geschwindigkeitsregelung zu verbessern oder den Verschleiß eines Antriebs zu reduzieren. Der Regler für die Regelstrecke G ist hier ein PI-Regler mit Vorsteuerung.
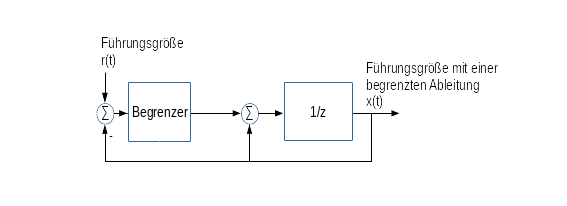
Gradienten-Begrenzer für eine Ableitung
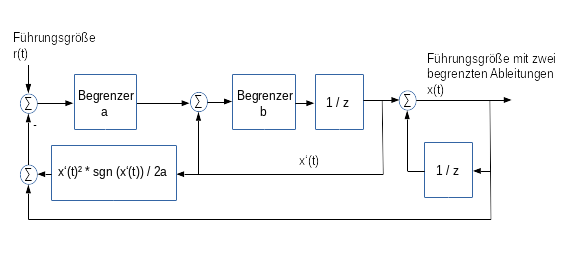
Gradienten-Begrenzer für zwei Ableitungen
Sprungantwort des Gradienten-Begrenzers für zwei Ableitungen
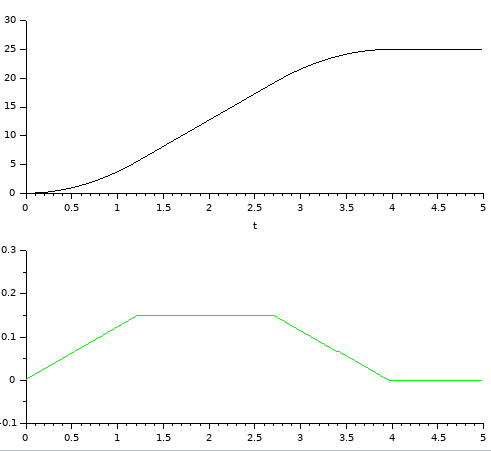
Oben x(t) und unten x'(t)